人工智能初级版-明机器人【带小片】

hi,大家好,在这个格外寒冷的冬天,360商城和上海慧流云计算科技有限公司给了大家一份2016新年大礼,我有幸获得了这份新年大礼。相信2016年一定棒棒哒。
这份大礼就是明机器人,由于机器不方便快递,大熊我只能上门自取。

我要吐槽一下:这个便携性真心好差,不过幸好可以这样横着提着走,强烈建议增加便携性,在盒子的底座上安装咕噜可以在平地推着走,这样便于携带,毕竟用途广泛需要经常携带。【不建议女生搬运,女汉子除外】
开撸测评开始
一、外观
外包装还是很霸道的,外包装就看的非常大,超出我的想象,之前认为回事铁杆自己安装,没想到是已经安装好的,这样的增加的包装箱尺寸。建议可以自己组装或是伸缩杆多分几层,减少包装尺寸,便于搬运携带,真是自己搬运过了才知道这么大的尺寸搬运真是不方便。


外包装也是很结实的,箱体硬度比较高也比较厚。内包装安全拍泡沫也是量身定制的,可以充分保证机器人的安全。包装细致入微,赞一个。

开箱来看看除了主机的其他配件,居然还有赠送的iPad的贴膜
钢化贴膜,很不错。
同时标配还有鱼眼镜头,可以有效增加视角,镜头是磁吸是安装方便,同时还有充电电源线以及说明书。

继续一起来看看明机器人的主机部分,通体黑色设计,很是高大上的感觉
先来看看正面,照片都是真实拍摄,是不是看着就很不错

转个身看一下,前后设计一致,外观设计非常有科技感

鱼眼镜头的特写,可以磁吸标配镜头


头部为插放iPad的地方,虽然是塑料材质,但是做工精细,而且内侧还有海绵泡沫,防止在插拔的时候损坏iPad。

机身,钢琴烤漆,搭配磨砂质感的2个轮子,看起来非常棒,亮眼但是不张扬。

机身侧面,白色装饰和轮子之间有缝隙,其实是用来显示指示灯颜色的,让你一目了然,了解机器人的各种情况和指标。
机器人设计有固定架,用于关机,或是长时间站立,以节省电量保持稳定性。

机身上唯一可以控制的地方,按钮是电源按钮,旁边的充电接口,这是整体机身唯一可以按和插的地方,而且还特别隐蔽。


轮子,轮子是磨砂软橡胶的,手感非常棒,防滑增加摩擦,干净的瓷砖地面也可以畅行无阻;同时用橡胶轮子还可以很好减少噪音,让运行起来安静无声。

再来看看侧面,轮子侧面在开机和充电的时候会有指示灯提示
蓝色闪烁为等待连接设备
蓝色常亮为连接成功可以进行使用
黄色闪烁为充电状态
红色为低电需要充电
而且光投射到地面还很好看呢,有没有
硬件部分的最后,来看看鱼眼镜头安装上的效果
鱼眼镜头可以有效放大视角,可以看见更多的画面

二、软件和操控
智能设备都需要操控,明机器人也不例外,需要iPad作为主控平台,充当头部控制中心,可以用iOS系统手机或PC电脑上的谷歌浏览器来控制操作明机器人。同时在控制机器人的时候,可以双向进行声音的传送,可以及时对话。
首先来看一段操控视频吧【视频为超清视频】
怎么样还不错吧,机器人在运行的时候没有噪音,非常安静,行走速度平稳匀速
接下来看看需要哪些操控APP
扫描配件包内二维码下载头部控制APP和控制APP,你也可以直接在AppStore中直接搜索“明机器人”进行下载安装。

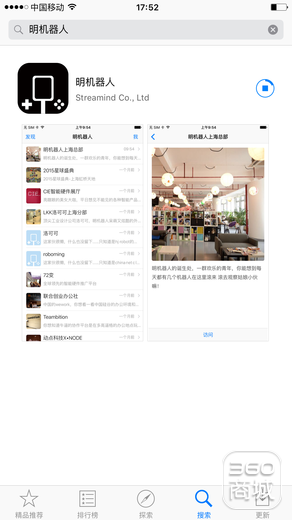

APP下载安装完毕之后,你需要在iPad上注册信息,注册非常简单输入手机接受验证码填写信息就可以了,控制端可以直接登录注册信息,信息注册之后你可以制定头像和机器人设备名称,也是方便识别机器人。

之后你会是机器人列表中发现已经连接的机器人


机器人头部iPad是通过蓝牙连接机器人

注册连接完毕,我们就可以点击控制端访问按钮来连接到机器人并控制机器人
等等几秒就可以获取的机器人图像了
图像全屏画面为iPad反馈回画面
连接成功后,iPad会显示手机前置摄像头的视频画面双方可以视频会话

左上角为本机画面,可以点击关闭
左下角为控制行动方向,可以点击箭头控制机器人前进后退转弯,最左下角为固定支架收起和放下按钮,需要固定时放下支架为更安全。
右下角为升降头部控制按钮,可以调节头部高度,最右下角为切换摄像头角度按钮,可以看到机器人脚下情况,有遇到障碍物可以方便躲避继续前行。

上图为安装鱼眼镜头的视频画面,视角明显宽泛
下图为未安装鱼眼镜头的视频画面,视角范围小很多
所以鱼眼镜头还是非常有必要安装的

再来一张头部获取到的视频画面截图

这里要提示一下,下视角的时候,要揭开反射玻璃膜,要不图像会非常不清楚



上图为未撕开保护膜
下图为撕开保护膜效果
前后对比还是比较明显的

机器人的方便操控性上还体现在可以在pc机用谷歌浏览器控制明机器人
在控制端进入机器人设置,你可以获取到系统为你生成的控制地址,在谷歌浏览器的地址栏内输入地址,登录连接机器人设备即可控制

点击右下角访问,进入控制模式


相对说和手机上控制非常类似,大同小异,除了可以用鼠标点击控制机器人,你也可以用键盘的方向键来控制明机器人的运行。在控制画面的右上角有问号图标,可以为你提供帮助,并且有相应的文字解释,让你控制明机器人超级简单。

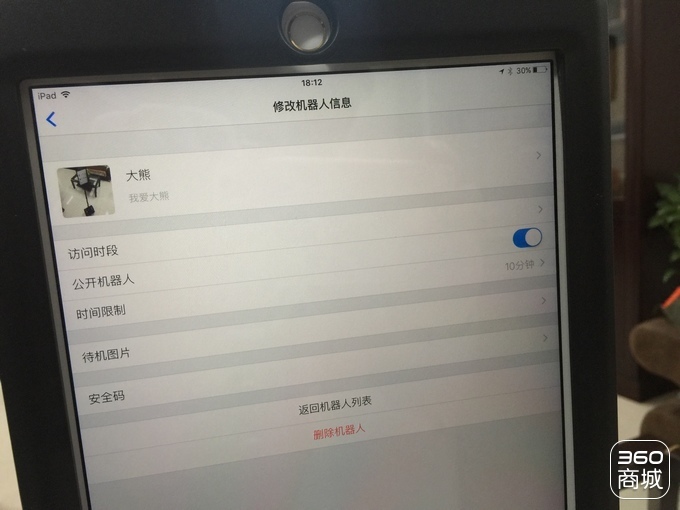
接下来说说,更多场景应用,在头部APP设置中有“待机图片”自定选项,你可以上传自己喜欢的图片、公司logo、或是相关的二维码等场景应用信息来满足明机器的在相关场景下的应用

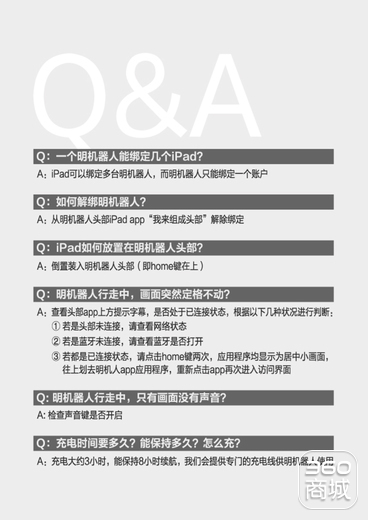
最后看看官方详细配置和相关问题解答
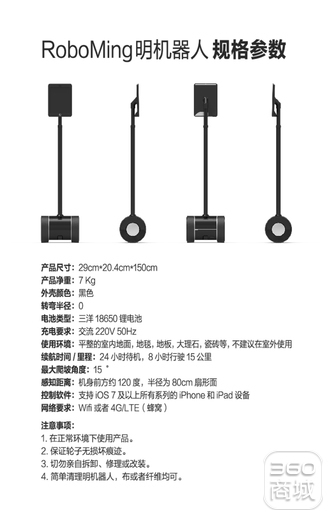
三、总结
特点优点很多,大家在看这篇测评的时候就能发现,重点说说不足和改进的地方:
1、控制配置要求太高,需要iPadair以上,控制端需要iOS设备而且也需要7以上的操作系统才能满足;这样的配置局限性很大。希望机器人本身内置控制平台系统,兼容安卓、iOS设备;
2、便携性很低,虽然可以自行行走,但是很多时候需要换到其他场所,这个搬运有点小累,可以分体组装形式减少包装体积,方便搬运;
3、头部回传画面质量很低,图像不够清晰,也许是为了节省带宽,用来增加控制相应速度,但是这个视频画面质量真心是好差;
4、延迟明显,画面延迟非常严重,控制也延迟,希望增加控制灵敏度;
5、可以适当增加趣味性的操作,比如运行速度调节,自动巡航,规划线路行驶、自动回到出发原点等,增加机器人的智能性;
6、升降头部有bug,当升到最顶端或是快到顶端时,链接头部的铁管会快速强烈的抖动震动,频率非常快,之后下降到最低端或是下降很大一部分才可以停止抖动,这个是比较吓人了,突然这样抖动还以为要爆炸了,哈哈;
7、增加语音控制,比如呼叫明机器人他会给你回应,并且会自动运行到呼叫人附近,之后语音告诉他需要连接谁,调取系统内提前存好的联系人,进行沟通;
8、建议在低端增加文件夹(小匡)方便传递一些文件、物品,考虑到平衡性,可以负重500g以下等等;
9、大bug最后说,探测障碍物能力实在是比较差,在实际控制中经常是依靠画面回传来控制,画面视角有限无法满足安全控制,加上基本上无障碍物探测,经常是咣咣撞墙装柜子,而且是不死心一直撞;另一场景就是会钻桌子哦,真的会跑的桌子下面去溜达玩;这个探测障碍物的能力一定要加强啊。
看2段视频就能知道明机器人是有多犟。
茶几相对来说比较矮,不敢用大桌子,怕机器人摔倒把pad摔坏
到这来,明机器人的测评报告结束,后期有其他问题或是好玩的功能会及时更新。
-完-





评论()